Robotica con Python
Robotica: integrando le discipline di base per creare macchine affascinanti che possano gradualmente imparare a imitare l'etica, comportamento e qualità umane. Il campo della robotica stupisce e incuriosisce persone di tutte le età in tutto il mondo. Questo articolo riprende da dove si era interrotto l'articolo precedente.
I robot possono imparare, navigare e prendere decisioni da soli. Questo articolo ti darà più esperienza con la robotica con Python. Spiegherà più concetti direttamente correlati ai robot e al campo della robotica. Ti mostrerò e spiegherò anche il codice Python che ho codificato (Fonte: Il mio PC) per un robot. Ora, andiamo dritti a questo!
Fonte: CIO.com
Componenti importanti del robot
Un robot ben costruito avrà la capacità di apprendere, navigare e prendere decisioni in modo autonomo e prenderete in modo efficace ed efficiente una decisione razionale e logica in caso di un cambiamento imprevisto nel vostro ambiente immediato. L'elemento che permette a un robot di diventare una parte fisica.
del suo ambiente sono i componenti che sono a bordo; In particolare, il Sensori. I sensori sono fondamentali in un sistema robotico in quanto riducono il
bisogno di interazione, aumentando così i livelli di autonomia in un sistema. Un elenco di sensori disponibili sul mercato è il seguente (va bene
sappi che l'elenco non è limitato a questi):
- – Sensori di luce.
- – Termometri.
- – Sensori di pressione.
- – Sensori di posizione.
- – Sala dei sensori.
- – Sensori flessibili.
- – Sensori sonori.
- – Sensori a ultrasuoni.
- – Sensori tattili.
- – Sensori PIR.
- – Sensori di inclinazione.
- – Sensori di gas.
Questi sono alcuni esempi di sensori che possono essere acquistati nei negozi di materiale elettrico. Se guardi da vicino, noterai che ognuno di questi sensori è in grado di rilevare uno stimolo specifico nell'ambiente immediato o distante. E ti renderai conto che se sono integrati in un unico sistema, questi componenti permetteranno a qualsiasi oggetto di rispondere a qualsiasi stimolo come può un essere umano.
Il modulo sensore rileverà un input da una sorgente e risponderà con un determinato output. Generalmente, un sensore convertirà qualsiasi quantità fisica o chimica non elettrica in segnali elettrici. L'input di un sensore deve essere mantenuto per avere un output coerente. Ad esempio, un sensore di movimento non emette una luce rossa se non ci sono oggetti in movimento nelle vicinanze. Ci sono tre sensori specifici di cui parleremo: Leggero, Suono e Ultrasuoni.
Sensori di luce
Questo sensore converte la frequenza della luce in segnali elettrici, vale a dire, l'uscita di questi segnali del sensore. Il segnale ci dice l'intensità della luce che viene rilevata. Funziona misurando le onde elettromagnetiche che esistono a tutte le frequenze della luce (infrarossi, visibile, ultravioletto).
Sensori sonori
Questo sensore rileva e converte le onde sonore in segnali elettrici. Il diaframma del microfono deve essere funzionante. Questo è perché
Le onde sonore che viaggiano nell'aria colpiscono il diaframma, facendolo vibrare e modificando le letture del condensatore. Le letture dei condensatori vengono convertite in segnali digitali che possono essere utilizzati per scopi di elaborazione.
Sensori a ultrasuoni:
Questo sensore convertirà le onde sonore riflesse in sensori elettrici. I sensori a ultrasuoni hanno la capacità di misurare la distanza tra gli oggetti. Il sensore a ultrasuoni ha un trasmettitore e un ricevitore integrati. Il trasmettitore invierà un'onda sonora sotto forma di segnali piezoelettrici e il ricevitore leggerà le onde sonore dopo che si è verificato il processo di riflessione..
Questi piccoli ma potenti dispositivi vengono utilizzati nella vita di tutti i giorni e ti consentiranno di eseguire calcoli di fascia alta sul tuo computer quando li porterai alla luce della robotica.. Ad esempio, l'azienda automobilistica di fama mondiale: Tesla Incorporated. I veicoli Tesla utilizzano numerosi sensori montati intorno all'auto.
Il veicolo Tesla utilizza sensori a ultrasuoni per assistere nell'allineamento delle ruote e nel centraggio stradale, insieme a LIDAR (rilevamento della luce e portata) per il rilevamento di oggetti, sensori sonori per rilevare oggetti nelle vicinanze del veicolo, telecamere per computer vision, apprendimento automatico, e altre tecnologie avanzate. Tutti questi sensori sono responsabili della creazione del veicolo autonomo che vediamo sulle strade.
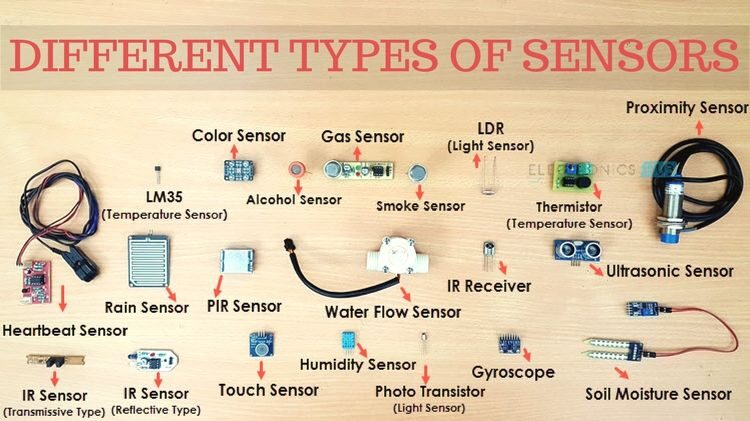
Fonte: Hub di elettronica
motori
Un motore comune da utilizzare quando si sperimenta la robotica con Python è il motore DC. DC significa corrente continua. I motori a corrente continua molto probabilmente hanno ruote attaccate all'estremità di uscita, vale a dire, l'energia meccanica che viene emessa verrà utilizzata per far girare le ruote. Un motore CC A è un componente elettrico che richiede un ingresso di corrente elettrica e fornisce un'uscita di energia meccanica o movimento.. I componenti all'interno del motore CC includono l'avvolgimento della bobina, I magneti, i rotori, spazzole, statore e sorgente di corrente.
L'idea su cui funziona è che quando la bobina è alimentata, vale a dire, viene attraversata da una corrente, attorno alla bobina si genera un campo magnetico, cosa fa interagire la bobina con i magneti?, che fa ruotare la bobina e infine produce energia meccanica.
Interruttore di alimentazione
Un robot avrà bisogno di un interruttore di alimentazione per accenderlo e spegnerlo. L'interruttore di alimentazione funge da interruttore di alimentazione per il robot, permettendo alla corrente di smettere di fluire nei circuiti e permettendo ai componenti di raffreddarsi. Quando l'interruttore è acceso, la corrente scorre nel circuito e quando è spento, il flusso di corrente si interrompe.
Interruttore a pulsante
Questo è un semplice dispositivo che può consentire o impedire il controllo di una macchina o di un processo specifico. Un interruttore a pulsante è costruito con circuiti elettrici che consentono il passaggio della corrente. Alterare il flusso di questa corrente è ciò che innesca gli eventi nel nostro circuito.
Gli interruttori a pulsante possono essere utilizzati per circuiti normalmente accesi o normalmente spenti. In un circuito normalmente acceso, attualmente scorre attraverso il circuito e, premendo il pulsante, il flusso di corrente è interrotto. In un circuito normalmente spento, nessuna connessione o flusso di elettricità fino a quando non viene premuto il pulsante.
Transistor
Un transistor è un semiconduttore che ha due funzioni. Può fungere da interruttore o da amplificatore di corrente. Un transistor per natura ha due fili (le zampe, minuscole aste di metallo per collegare i fili). Come un interruttore, il transistor ridurrà la corrente su un lato dei fili e aumenterà la corrente sull'altro lato. Come amplificatore, il transistor accetterà la corrente in un filo e la emetterà dall'altro a una corrente più alta.
Resistore
Questo è uno dei componenti elettronici più popolari e ampiamente utilizzati. Ha due terminali (cavi / gambe) e l'integrazione di questo nel tuo circuito elettrico implementerà la resistenza nel tuo circuito. Il resistore può essere utilizzato per ridurre il flusso di corrente, dividere la tensione e regolare i livelli del segnale elettrico.
Controlla i componenti del robot con Python.
Controllo dell'interruttore a pulsante.
# iniziamo importando il pacchetto necessario
importa RPi.GPIO come GPIO
# configuriamo il nostro sistema per ignorare temporaneamente tutti gli avvisi
GPIO.setwarnings(falso)
# impostiamo il nostro sistema per utilizzare la numerazione fisica dei pin
# sul Raspberry Pi
GPIO.setmode(GPIO.BOARD)
# configuriamo il numero pin GPIO 10 sul nostro Raspberry Pi per essere
# un pin di input e impostiamo lo stato iniziale del pin su essere
# tirato basso "PUD_DOWN". Ciò significa che il pulsante è in
# un "SPENTO" stato
GPIO.setup(10, GPIO.IN, pull_up_down=GPIO.PUD_DOWN)
# impostiamo un ciclo While che durerà per sempre
# il ciclo While controllerà costantemente lo stato di
# il nostro interruttore a pulsante. In caso di nostro pulsante
# essere premuto, ci sono parole che verranno stampate
# alla console
mentre vero:
# controlliamo se il numero pin GPIO 10 è spinto
# controlliamo la corrente che scorre attraverso il pulsante
# se la corrente è alta
se GPIO.input(10) == GPIO.ALTA:
# stampiamo le seguenti parole
Stampa("Il pulsante è stato premuto!")
Controllo di motori DC
# iniziamo importando i pacchetti necessari
tempo di importazione
da easygopigo3 importa EasyGoPiGo3
# creiamo un'istanza del Robot che stiamo utilizzando
# Se desideri sbizzarrirti nel campo della Robotica
# navigare in un browser web e cercare "Cos'è GoPiGo3"
# è interessante :) - potresti essere convinto ad acquistare un'unità per te stesso
gpg = EasyGoPiGo3()
# configuriamo i motori per andare avanti per due secondi
gpg.forward()
tempo.dormire(2)
# fermiamo tutti i movimenti del motore per un secondo
gpg.stop()
tempo.dormire(1)
# guidiamo tutti i motori in avanti di 50 cm
gpg.drive_cm(50, Vero)
tempo.dormire(1)
# giriamo i motori a sinistra
gpg.left()
tempo.dormire(1)
# giriamo i motori a destra
gpg.right()
tempo.dormire(1)
# fermiamo tutte le attività dei robot
gpg.stop()
# stampiamo un messaggio finale che ci dice se lo script
# ha avuto successo
Stampa("Movimento di successo!")
Il sensore a ultrasuoni
Ti starai chiedendo come utilizzare il sensore a ultrasuoni per un robot. Ora, il sensore a ultrasuoni viene utilizzato per creare una mappa basata su LIDAR dell'area in cui risiede attualmente il robot. Il sensore a ultrasuoni viene utilizzato in combinazione con un servo (il motore) consentendo al sensore a ultrasuoni di ruotare, permettendo al robot “vedere” più dei suoi dintorni. Non fornirò il codice completo, in quanto è esteso e richiede comprensione. Fornirò un'immagine troncata del codice trovato sul mio PC.
Per dare una breve spiegazione delle funzioni di questa mappa è la seguente; permetterà al nostro robot di vedere digitalmente l'ambiente in cui si trova. Il sensore a ultrasuoni, come lo conosciamo, ha la capacità di misurare la distanza, e quando combinato con le fotocamere (visione computerizzata) e la mappa in tempo reale che viene generata, possiamo identificare efficacemente gli oggetti e navigare intorno ad essi.
 Alla fine del codice, c'è un “se dichiarazione” che esegue il controllo finale per vedere se un oggetto si trova entro la distanza specificata dal robot, ad esempio, 10 cm.
Alla fine del codice, c'è un “se dichiarazione” che esegue il controllo finale per vedere se un oggetto si trova entro la distanza specificata dal robot, ad esempio, 10 cm.
Spero che questo articolo ti abbia fornito maggiori informazioni sulla robotica con Python. Se sei una persona a cui piace giocare con Python e l'informatica o la robotica in generale, Ti consiglio di acquistare uno o due sensori e una "breadboard". Si tratta di componenti che possono essere acquistati a prezzi ragionevoli sul mercato e che sicuramente ti incuriosiranno..
Grazie per il tuo tempo.
I media mostrati in questo articolo: La robotica con Python non è di proprietà di DataPeaker e viene utilizzata a discrezione dell'autore.





