Robótica con Python
Robótica: la integración de disciplinas básicas para crear máquinas fascinantes que pueden aprender gradualmente a imitar la ética, el comportamiento y las cualidades humanas. El campo de la robótica asombra e intriga a personas de todas las edades en todo el mundo. Este artículo comienza donde lo dejó el artículo anterior.
Los robots pueden aprender, navegar y tomar decisiones por sí mismos. Este artículo le proporcionará más experiencia con Robotics With Python. Explicará más conceptos que están directamente relacionados con Robots y el campo de la Robótica. También te mostraré y explicaré el código Python que he codificado (Fuente: Mi PC) para un Robot. ¡Ahora, vayamos directamente a eso!
Fuente: CIO.com
Componentes importantes del robot
Un robot bien construido poseerá la capacidad de aprender, navegar y tomar decisiones de forma autónoma y tomará de manera efectiva y eficiente una decisión racional y lógica en caso de un cambio imprevisto en su entorno inmediato. El elemento que permite que un robot se convierta en una parte física.
de su entorno son los componentes que se encuentran a bordo; Específicamente, el Sensores. Los sensores son cruciales en un sistema robótico ya que reducen la
necesidad de interacción, aumentando así los niveles de autonomía en un sistema. Una lista de sensores que están disponibles en el mercado es la siguiente (es bueno
sepa que la lista no se limita a estos):
- – Sensores de luz.
- – Sensores de temperatura.
- – Sensores de presión.
- – Sensores de posición.
- – Sensores Hall.
- – Sensores Flex.
- – Sensores de sonido.
- – Sensores ultrasónicos.
- – Sensores táctiles.
- – Sensores PIR.
- – Sensores de inclinación.
- – Sensores de gas.
Estos son algunos ejemplos de sensores que se pueden comprar en tiendas de electricidad. Si miras de cerca, notarás que cada uno de estos sensores puede detectar un estímulo específico en el entorno inmediato o distante. Y te darás cuenta de que si se integran en un solo sistema, estos componentes permitirán que cualquier objeto responda a cualquier estímulo como puede hacerlo un ser humano.
El módulo sensor detectará una entrada de una fuente y responderá con una determinada salida. En general, un sensor convertirá cualquier cantidad física o química no eléctrica en señales eléctricas. La entrada de un sensor debe mantenerse para que usted tenga una salida consistente. Por ejemplo, un sensor de movimiento no emitirá una luz roja si no hay ningún objeto moviéndose cerca. Hay tres sensores específicos que discutiremos: Luz, Sonido y Ultrasónico.
Sensores de luz
Este sensor convierte la frecuencia de la luz en señales eléctricas, es decir, la salida de estas señales del sensor. La señal nos dice la intensidad de la luz que se detecta. Funciona midiendo las ondas electromagnéticas que existen en todas las frecuencias de luz (infrarroja, visible, ultravioleta).
Sensores de sonido
Este sensor detecta y convierte ondas sonoras en señales eléctricas. El diafragma del micrófono debe estar en condiciones de funcionamiento. Esto es porque
Las ondas sonoras que viajan en el medio aéreo golpean el diafragma, provocando que vibre y cambie las lecturas del condensador. Las lecturas de los condensadores se convierten en señales digitales que pueden utilizarse con fines de procesamiento.
Sensores ultrasónicos:
Este sensor convertirá las ondas sonoras reflejadas en sensores eléctricos. Los sensores ultrasónicos tienen la capacidad de medir la distancia entre objetos. El sensor ultrasónico tiene un transmisor y un receptor integrados. El transmisor enviará una onda de sonido en forma de señales piezoeléctricas y el receptor leerá las ondas de sonido después de que se haya producido el proceso de reflexión.
Estos dispositivos pequeños pero poderosos se utilizan en la vida cotidiana y le otorgarán acceso a la realización de cálculos de alta gama en su computadora cuando los lleve a la luz de la robótica. Por ejemplo, la empresa automotriz conocida a escala mundial: Tesla Incorporated. Los vehículos Tesla utilizan numerosos sensores que están montados alrededor del automóvil.
El vehículo Tesla hace uso de sensores ultrasónicos para ayudar con la alineación de las ruedas y el centrado en la carretera, junto con LIDAR (detección de luz y rango) para la detección de objetos, sensores de sonido para detectar objetos en las cercanías del vehículo, cámaras para visión por computadora, aprendizaje automático, y otra tecnología avanzada. Todos estos sensores son los encargados de crear el vehículo autónomo que vemos en las carreteras.
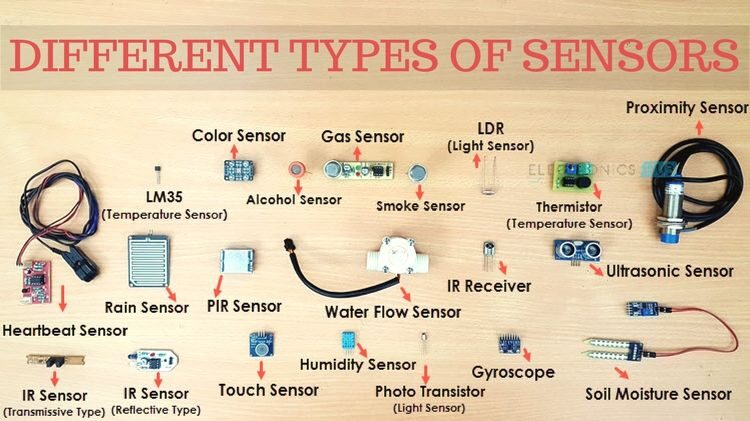
Fuente: Hub de electrónica
Motores
Un motor común para usar cuando experimentas con robótica con Python es el motor de CC. DC significa corriente continua. Lo más probable es que los motores de CC tengan ruedas conectadas al extremo de salida, es decir, la energía mecánica que se emite se utilizará para hacer girar las ruedas. Un motor de CC A es un componente eléctrico que requiere una entrada de corriente eléctrica y proporciona una salida de energía mecánica o movimiento. Los componentes dentro del motor de CC incluyen el devanado de la bobina, los imanes, los rotores, las escobillas, el estator y la fuente de corriente.
La idea en la que esto funciona es que cuando la bobina está alimentada, es decir, se pasa una corriente a través de ella, se genera un campo magnético alrededor de la bobina, lo que hace que la bobina interactúe con los imanes, lo que hace que la bobina gire y finalmente produzca energía mecánica.
Interruptor de alimentación
Un robot necesitará un interruptor de encendido para encenderlo y apagarlo. El interruptor de encendido sirve como un interruptor de energía para el robot, permitiendo que la corriente deje de fluir en los circuitos y permitiendo que los componentes se enfríen. Cuando el interruptor está encendido, la corriente fluye en el circuito y cuando está apagado, el flujo de corriente se detiene.
Interruptor de botón pulsador
Este es un dispositivo simple que puede permitir o prevenir el control de una máquina o proceso específico. Un interruptor de botón está construido con circuitos eléctricos que permiten que la corriente pase a través de él. Alterar el flujo de esta corriente es lo que desencadena eventos en nuestro circuito.
Los interruptores de botón se pueden usar para circuitos normalmente encendidos o normalmente apagados. En un circuito normalmente encendido, actualmente fluye a través del circuito y, al presionar el botón, se interrumpe el flujo de corriente. En un circuito normalmente apagado, no hay conexión ni flujo de electricidad hasta que se presiona el botón.
Transistor
Un transistor es un semiconductor que tiene dos funciones. Puede actuar como un interruptor o como un amplificador de corriente. Un transistor por naturaleza tiene dos cables (o patas, varillas de metal diminutas para conectar los cables). Como interruptor, el transistor reducirá la corriente en un lado de los cables y aumentará la corriente en el otro lado. Como amplificador, el transistor aceptará corriente en un cable y la emitirá desde el otro a una corriente más alta.
Resistor
Este es uno de los componentes electrónicos más populares y utilizados. Tiene dos terminales (cables / patas) e integrar esto en su circuito eléctrico implementará resistencia en su circuito. La resistencia se puede utilizar para reducir el flujo de corriente, dividir el voltaje y ajustar los niveles de señales eléctricas.
Controlar los componentes del robot con Python.
Control del interruptor de botón pulsador.
# we begin by importing the necessary package
import RPi.GPIO as GPIO
# we configure our system to temporarily ignore all warnings
GPIO.setwarnings(False)
# we set our system to use the physical pin numbering
# on the Raspberry Pi
GPIO.setmode(GPIO.BOARD)
# we configure The GPIO pin number 10 on our Raspberry Pi to be
# an input pin and we set the initial state of the pin to be
# pulled low "PUD_DOWN". This means that the button is in
# an "OFF" state
GPIO.setup(10, GPIO.IN, pull_up_down=GPIO.PUD_DOWN)
# we set up a While loop that is going to run forever
# the While loop is going to constantly check the state of
# our Push Button Switch. In the event of our button
# being pressed, there are words that will be printed
# to the console
while True:
# we check if the GPIO pin number 10 is pushed
# we check the current running throught the button
# if the current is high
if GPIO.input(10) == GPIO.HIGH:
# we print the following words
print("Button was pushed!")
Control de los motores de CC
# we begin by importing the necessary packages
import time
from easygopigo3 import EasyGoPiGo3
# we create an instance of the Robot that we are using
# If you wish to indulge in the field of Robotics
# navigate to a web browser and search "What is GoPiGo3"
# it is interesting :) - you may be persuaded to purchase a unit for yourself
gpg = EasyGoPiGo3()
# we configure the motors to move forward for two seconds
gpg.forward()
time.sleep(2)
# we stop all motor movement for one second
gpg.stop()
time.sleep(1)
# we drive all motors 50cm forward
gpg.drive_cm(50, True)
time.sleep(1)
# we turn the motors to the left
gpg.left()
time.sleep(1)
# we turn the motors to the right
gpg.right()
time.sleep(1)
# we stop all robot activity
gpg.stop()
# we print a final message telling us if the script
# was successful
print("Movement Successful!")
El sensor ultrasónico
Quizás se esté preguntando cómo se usa el sensor ultrasónico para un robot. Ahora, el sensor ultrasónico se utiliza para crear un mapa basado en LIDAR del área en la que reside el robot en la actualidad. El sensor ultrasónico se utiliza en combinación con un servo (motor) que permite girar el sensor ultrasónico, lo que permite que el robot «vea» más de su entorno. No proporcionaré el código completo, ya que es extenso y requiere comprensión. Proporcionaré una imagen truncada del código que se encuentra en mi PC.
Para dar una breve explicación de las funciones de este mapa es como sigue; permitirá digitalmente a nuestro robot ver el entorno en el que se encuentra. El sensor ultrasónico, como lo conocemos, tiene la capacidad de medir la distancia, y cuando se combina con las cámaras (visión por computadora) y el mapa en tiempo real que se genera, podemos identificar objetos de manera efectiva y navegar alrededor de ellos.
Al final del código, existe una «instrucción if» que hace la verificación final para ver si un objeto está dentro de la distancia especificada del robot, por ejemplo, 10 cm.
Espero que este artículo le haya proporcionado más información sobre Robótica con Python. Si eres una persona a la que le gusta jugar con Python y la tecnología de la información o la robótica en general, te recomiendo que compres uno o dos sensores y una “placa de pruebas”. Estos son componentes que se pueden comprar a precios razonables en el mercado y definitivamente lo mantendrán intrigado.
Gracias por tu tiempo.
Los medios que se muestran en este artículo: Robotics With Python no son propiedad de DataPeaker y se utilizan a discreción del autor.





