Introducción
¡Hola lectores!
OpenCV – Visión por computadora de código abierto. Es una de las herramientas más utilizadas para tareas de procesamiento de imágenes y visión artificial. Se utiliza en diversas aplicaciones como detección de rostros, captura de video, seguimiento de objetos en movimiento, revelación de objetos, hoy en día en aplicaciones Covid como detección de mascarillas, distanciamiento social y muchas más. Si quieres saber más sobre OpenCV, consulta esto Enlace.
📌Si desea obtener más información sobre las bibliotecas de Python para el procesamiento de imágenes, consulte este enlace.
📌Si desea aprender a procesar imágenes usando NumPy, 😋marque este enlace.
📌Para más artículos😉, haga clic aquí
En este blog, cubriré OpenCV en gran detalle cubriendo algunas de las tareas más importantes en el procesamiento de imágenes mediante implementación práctica. ¡¡Así que comencemos !! ⌛
Imagen Fuente
Tabla de contenido
- Detección de bordes y degradados de imagen
- Dilatación, apertura, cierre y erosión
- Transformación de perspectiva
- Pirámides de imágenes
- Recortar
- Escalado, interpolaciones y cambio de tamaño
- Umbralización, umbralización adaptativa y binarización
- Afilado
- Borrón
- Contornos
- Detección de líneas mediante líneas duras
- Encontrar esquinas
- Contando círculos y elipses

Imagen Fuente
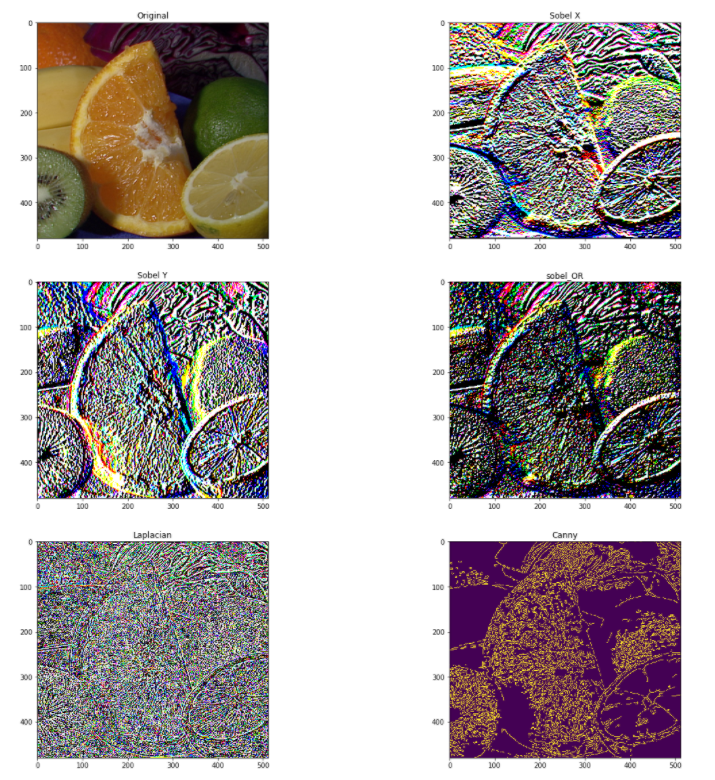
Detección de bordes y degradados de imagen
Es una de las técnicas más fundamentales e importantes en el procesamiento de imágenes. Verifique el código a continuación para una implementación completa. Para obtener más información, consulte este Enlace.
image = cv2.imread('fruit.jpg')
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
hgt, wdt,_ = image.shape
# Sobel Edges
x_sobel = cv2.Sobel(image, cv2.CV_64F, 0, 1, ksize=5)
y_sobel = cv2.Sobel(image, cv2.CV_64F, 1, 0, ksize=5)
plt.figure(figsize=(20, 20))
plt.subplot(3, 2, 1)
plt.title("Original")
plt.imshow(image)
plt.subplot(3, 2, 2)
plt.title("Sobel X")
plt.imshow(x_sobel)
plt.subplot(3, 2, 3)
plt.title("Sobel Y")
plt.imshow(y_sobel)
sobel_or = cv2.bitwise_or(x_sobel, y_sobel)
plt.subplot(3, 2, 4)
plt.imshow(sobel_or)
laplacian = cv2.Laplacian(image, cv2.CV_64F)
plt.subplot(3, 2, 5)
plt.title("Laplacian")
plt.imshow(laplacian)
## There are two values: threshold1 and threshold2.
## Those gradients that are greater than threshold2 => considered as an edge
## Those gradients that are below threshold1 => considered not to be an edge.
## Those gradients Values that are in between threshold1 and threshold2 => either classified as edges or non-edges
# The first threshold gradient
canny = cv2.Canny(image, 50, 120)
plt.subplot(3, 2, 6)
plt.imshow(canny)
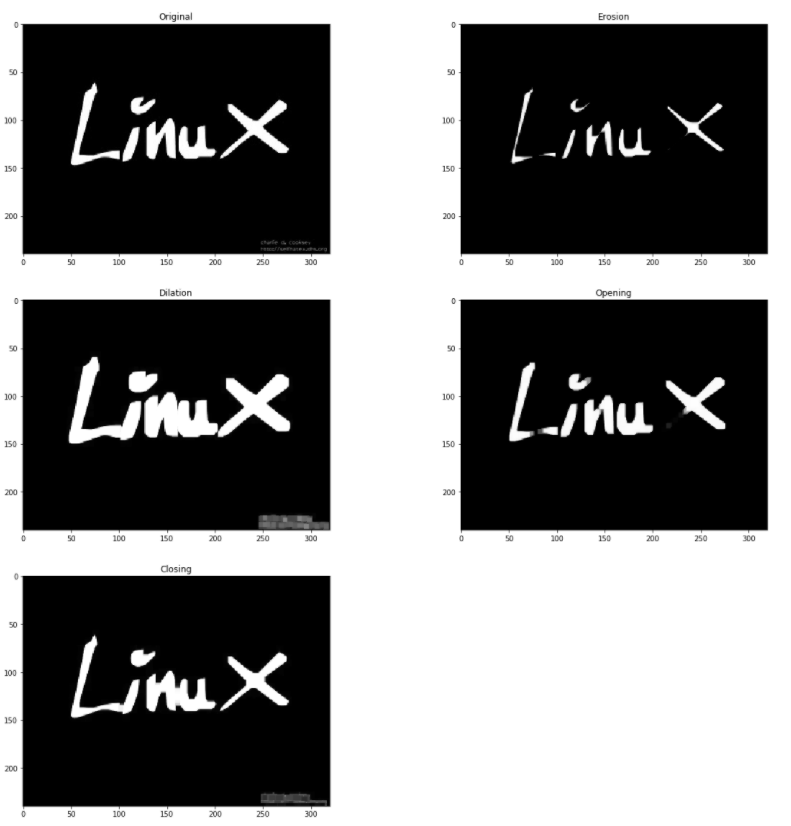
Dilatación, apertura, cierre y erosión
Estas son dos operaciones fundamentales de procesamiento de imágenes. Se utilizan para eliminar ruidos, encontrar un agujero de intensidad o un bache en una imagen y muchos más. Consulte el siguiente código para una implementación práctica. Para obtener más información, consulte este Enlace.
image = cv2.imread('LinuxLogo.jpg')
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
plt.figure(figsize=(20, 20))
plt.subplot(3, 2, 1)
plt.title("Original")
plt.imshow(image)
kernel = np.ones((5,5), np.uint8)
erosion = cv2.erode(image, kernel, iterations = 1)
plt.subplot(3, 2, 2)
plt.title("Erosion")
plt.imshow(erosion)
dilation = cv2.dilate(image, kernel, iterations = 1)
plt.subplot(3, 2, 3)
plt.title("Dilation")
plt.imshow(dilation)
opening = cv2.morphologyEx(image, cv2.MORPH_OPEN, kernel)
plt.subplot(3, 2, 4)
plt.title("Opening")
plt.imshow(opening)
closing = cv2.morphologyEx(image, cv2.MORPH_CLOSE, kernel)
plt.subplot(3, 2, 5)
plt.title("Closing")
plt.imshow(closing)
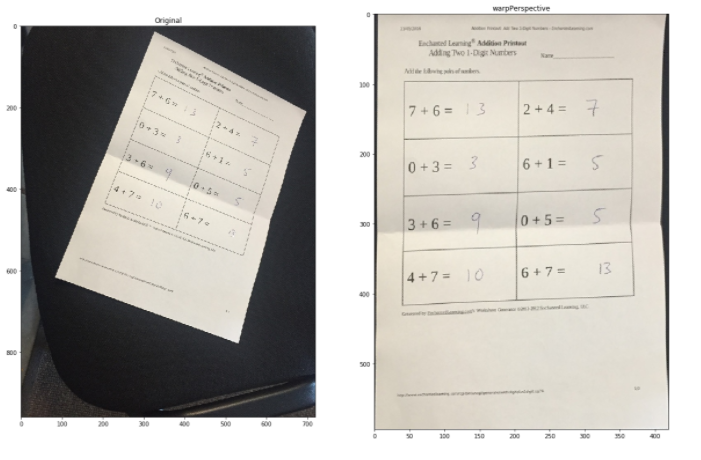
Transformación de perspectiva
Para obtener mejor información sobre una imagen, podemos cambiar la perspectiva de un video o una imagen. En esta transformación, necesitamos proporcionar los puntos en una imagen desde donde queremos tomar información cambiando la perspectiva. En OpenCV, usamos dos funciones para la transformación de perspectiva getPerspectiveTransform () y luego warpPerspective (). Verifique el código a continuación para una implementación completa. Para obtener más información, consulte este Enlace.
image = cv2.imread('scan.jpg')
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
plt.figure(figsize=(20, 20))
plt.subplot(1, 2, 1)
plt.title("Original")
plt.imshow(image)
points_A = np.float32([[320,15], [700,215], [85,610], [530,780]])
points_B = np.float32([[0,0], [420,0], [0,594], [420,594]])
M = cv2.getPerspectiveTransform(points_A, points_B)
warped = cv2.warpPerspective(image, M, (420,594))
plt.subplot(1, 2, 2)
plt.title("warpPerspective")
plt.imshow(warped)
Pirámides de imágenes
Es una técnica muy útil cuando necesitamos escalar en la detección de objetos. OpenCV usa dos tipos comunes de pirámides de imágenes Gaussiano y Laplaciano pirámide. Utilizar el pirup () y pyrDown () función en OpenCV para reducir o aumentar una imagen. Consulte el siguiente código para una implementación práctica. Para obtener más información, consulte este Enlace.
image = cv2.imread('butterfly.jpg')
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
plt.figure(figsize=(20, 20))
plt.subplot(2, 2, 1)
plt.title("Original")
plt.imshow(image)
smaller = cv2.pyrDown(image)
larger = cv2.pyrUp(smaller)
plt.subplot(2, 2, 2)
plt.title("Smaller")
plt.imshow(smaller)
plt.subplot(2, 2, 3)
plt.title("Larger")
plt.imshow(larger)

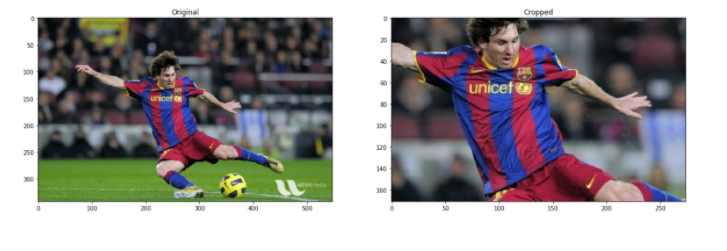
Recortar
Es una de las técnicas más importantes y fundamentales en el procesamiento de imágenes, el recorte se utiliza para obtener una parte particular de una imagen. Para recortar una imagen. Solo necesitas las coordenadas de una imagen según tu área de interés. Para un análisis completo, consulte el siguiente código en OpenCV.
image = cv2.imread('messi.jpg')
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
plt.figure(
Aigsize=(20, 20))
plt.subplot(2, 2, 1)
plt.title("Original")
plt.imshow(image)
hgt, wdt = image.shape[:2]
start_row, start_col = int(hgt * .25), int(wdt * .25)
end_row, end_col = int(height * .75), int(width * .75)
cropped = image[start_row:end_row , start_col:end_col]
plt.subplot(2, 2, 2)
plt.imshow(cropped)
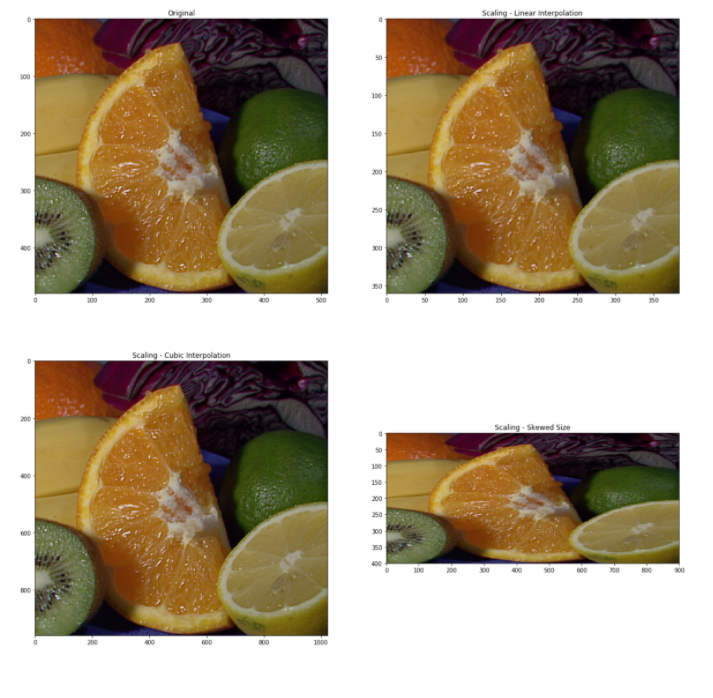
Escalado, interpolaciones y cambio de tamaño
Redimensionamiento es una de las tareas más sencillas en OpenCV. Proporciona un redimensionar () función que toma parámetrosLos "parámetros" son variables o criterios que se utilizan para definir, medir o evaluar un fenómeno o sistema. En diversos campos como la estadística, la informática y la investigación científica, los parámetros son fundamentales para establecer normas y estándares que guían el análisis y la interpretación de datos. Su adecuada selección y manejo son cruciales para obtener resultados precisos y relevantes en cualquier estudio o proyecto.... como imagen, imagen de tamaño de salida, interpolación, escala xy escala y. Verifique el código a continuación para una implementación completa.
image = cv2.imread('/kaggle/input/opencv-samples-images/data/fruits.jpg')
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
plt.figure(figsize=(20, 20))
plt.subplot(2, 2, 1)
plt.title("Original")
plt.imshow(image)
image_scaled = cv2.resize(image, None, fx=0.75, fy=0.75)
plt.subplot(2, 2, 2)
plt.title("Scaling - Linear Interpolation")
plt.imshow(image_scaled)
img_scaled = cv2.resize(image, None, fx=2, fy=2, interpolation = cv2.INTER_CUBIC)
plt.subplot(2, 2, 3)
plt.title("Scaling - Cubic Interpolation")
plt.imshow(img_scaled)
img_scaled = cv2.resize(image, (900, 400), interpolation = cv2.INTER_AREA)
plt.subplot(2, 2, 4)
plt.title("Scaling - Skewed Size")
plt.imshow(img_scaled)
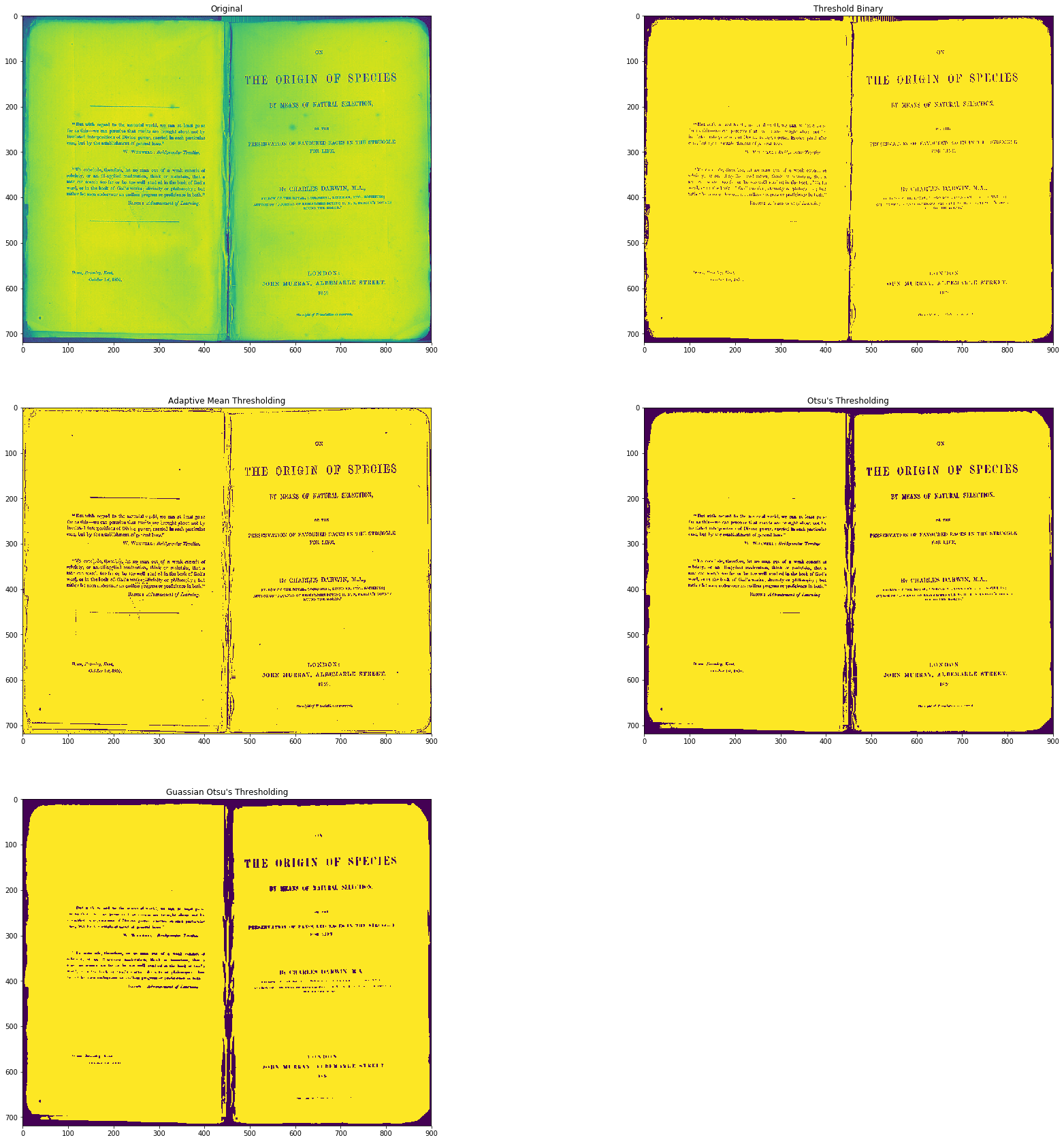
Umbralización, umbralización adaptativa y binarización
Verifique el código a continuación para una implementación completa. Para obtener más información, consulte este Enlace.
# Load our new image
image = cv2.imread('Origin_of_Species.jpg', 0)
plt.figure(figsize=(30, 30))
plt.subplot(3, 2, 1)
plt.title("Original")
plt.imshow(image)
ret,thresh1 = cv2.threshold(image, 127, 255, cv2.THRESH_BINARY)
plt.subplot(3, 2, 2)
plt.title("Threshold Binary")
plt.imshow(thresh1)
image = cv2.GaussianBlur(image, (3, 3), 0)
thresh = cv2.adaptiveThreshold(image, 255, cv2.ADAPTIVE_THRESH_MEAN_C, cv2.THRESH_BINARY, 3, 5)
plt.subplot(3, 2, 3)
plt.title("Adaptive Mean Thresholding")
plt.imshow(thresh)
_, th2 = cv2.threshold(image, 0, 255, cv2.THRESH_BINARY + cv2.THRESH_OTSU)
plt.subplot(3, 2, 4)
plt.title("Otsu's Thresholding")
plt.imshow(th2)
plt.subplot(3, 2, 5)
blur = cv2.GaussianBlur(image, (5,5), 0)
_, th3 = cv2.threshold(blur, 0, 255, cv2.THRESH_BINARY + cv2.THRESH_OTSU)
plt.title("Guassian Otsu's Thresholding")
plt.imshow(th3)
plt.show()
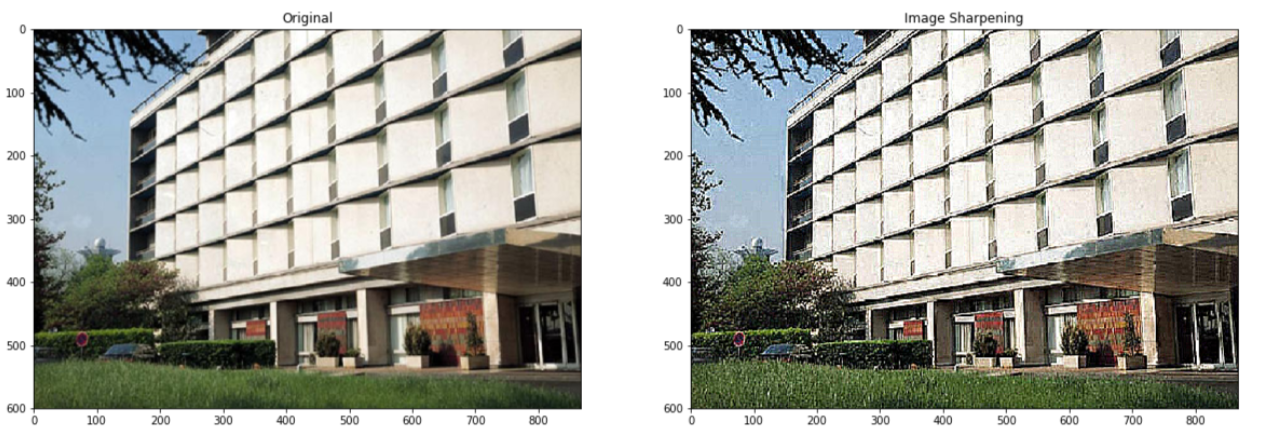
Afilado
Verifique el siguiente código para enfocar una imagen usando OpenCV. Para obtener más información, consulte este Enlace
image = cv2.imread('building.jpg')
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
plt.figure(figsize=(20, 20))
plt.subplot(1, 2, 1)
plt.title("Original")
plt.imshow(image)
kernel_sharpening = np.array([[-1,-1,-1],
[-1,9,-1],
[-1,-1,-1]])
sharpened = cv2.filter2D(image, -1, kernel_sharpening)
plt.subplot(1, 2, 2)
plt.title("Image Sharpening")
plt.imshow(sharpened)
plt.show()
Borrón
Verifique el siguiente código para desenfocar una imagen usando OpenCV. Para obtener más información, consulte este Enlace
image = cv2.imread('home.jpg')
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
plt.figure(figsize=(20, 20))
plt.subplot(2, 2, 1)
plt.title("Original")
plt.imshow(image)
kernel_3x3 = np.ones((3, 3), np.float32) / 9
blurred = cv2.filter2D(image, -1, kernel_3x3)
plt.subplot(2, 2, 2)
plt.title("3x3 Kernel Blurring")
plt.imshow(blurred)
kernel_7x7 = np.ones((7, 7), np.float32) / 49
blurred2 = cv2.filter2D(image, -1, kernel_7x7)
plt.subplot(2, 2, 3)
plt.title("7x7 Kernel Blurring")
plt.imshow(blurred2)

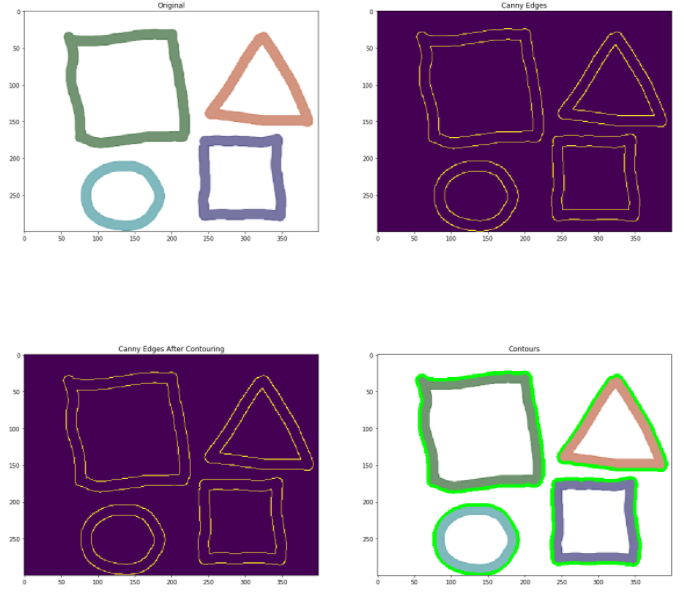
Contornos
Contornos de imagen: es una forma de identificar los contornos estructurales de un objeto en una imagen. Es útil identificar la forma de un objeto. OpenCV proporciona una findContours función en la que necesita pasar bordes astutos como parámetro. Verifique el código a continuación para una implementación completa. Para obtener más información, consulte este Enlace.
# Load the data
image = cv2.imread('pic.png')
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
plt.figure(figsize=(20, 20))
plt.subplot(2, 2, 1)
plt.title("Original")
plt.imshow(image)
# Grayscale
gray = cv2.cvtColor(image,cv2.COLOR_BGR2GRAY)
# Canny edges
edged = cv2.Canny(gray, 30, 200)
plt.subplot(2, 2, 2)
plt.title("Canny Edges")
plt.imshow(edged)
# Finding Contours
contour, hier = cv2.findContours(edged, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)
plt.subplot(2, 2, 3)
plt.imshow(edged)
print("Count of Contours = " + str(len(contour)))
# All contours
cv2.drawContours(image, contours, -1, (0,255,0), 3)
plt.subplot(2, 2, 4)
plt.title("Contours")
plt.imshow(image)
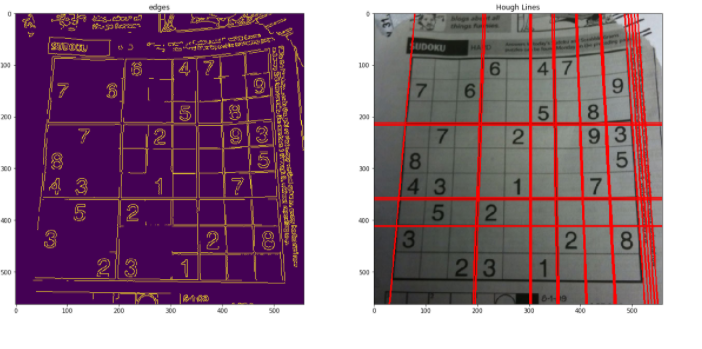
Detección de líneas mediante líneas duras
Las líneas se pueden detectar en una imagen usando líneas Hough. OpenCV proporciona una Función HouhLines en el que debe pasar el valor de umbral. El umbral es el voto mínimo para que se considere una línea. Para obtener una descripción detallada, consulte el siguiente código para una implementación completa. Para la detección de líneas usando líneas Hough en OpenCV. Para obtener más información, consulte este Enlace.
# Load the image
image = cv2.imread('sudoku.png')
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
plt.figure(figsize=(20, 20))
# Grayscale
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# Canny Edges
edges = cv2.Canny(gray, 100, 170, apertureSize = 3)
plt.subplot(2, 2, 1)
plt.title("edges")
plt.imshow(edges)
# Run HoughLines Fucntion
lines = cv2.HoughLines(edges, 1, np.pi/180, 200)
# Run for loop through each line
for line in lines:
rho, theta = line[0]
a = np.cos(theta)
b = np.sin(theta)
x0 = a * rho
y0 = b * rho
x_1 = int(x0 + 1000 * (-b))
y_1 = int(y0 + 1000 * (a))
x_2 = int(x0 - 1000 * (-b))
y_2 = int(y0 - 1000 * (a))
cv2.line(image, (x_1, y_1), (x_2, y_2), (255, 0, 0), 2)
# Show Final output
plt.subplot(2, 2, 2)
plt.imshow(image)
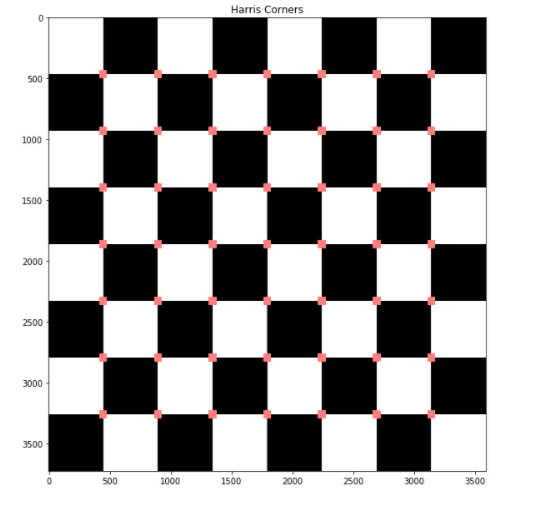
Encontrar esquinas
Para encontrar las esquinas de una imagen, use el función cornerHarris desde OpenCV. Para obtener una descripción general detallada, consulte el código a continuación para una implementación completa para encontrar esquinas usando OpenCV. Para obtener más información, consulte este Enlace.
# Load image
image = cv2.imread('chessboard.png')
# Grayscaling
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
plt.figure(figsize=(10, 10))
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# CornerHarris function want input to be float
gray = np.float32(gray)
h_corners = cv2.cornerHarris(gray, 3, 3, 0.05)
kernel = np.ones((7,7),np.uint8)
h_corners = cv2.dilate(harris_corners, kernel, iterations = 10)
image[h_corners > 0.024 * h_corners.max() ] = [256, 128, 128]
plt.subplot(1, 1, 1)
# Final Output
plt.imshow(image)
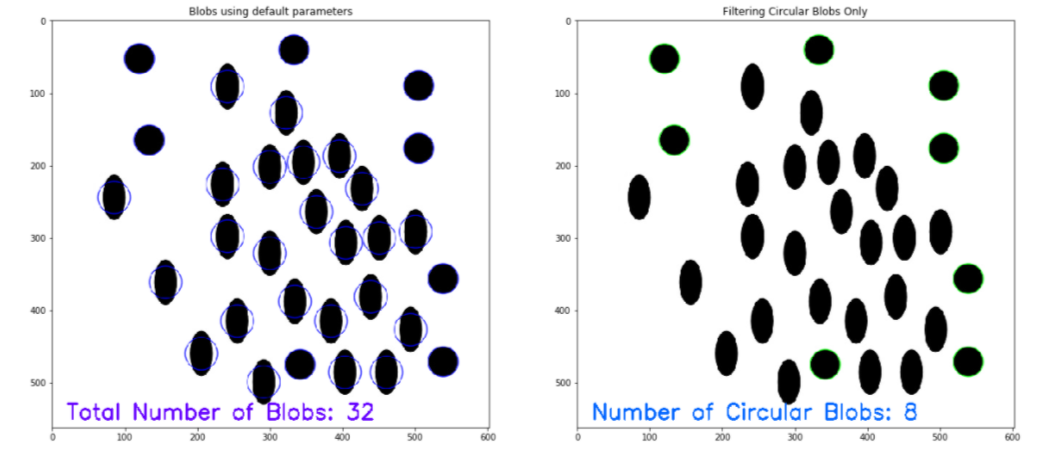
Contando círculos y elipses
Para contar círculos y elipse en una imagen, use el Función SimpleBlobDetector desde OpenCV. Para obtener una descripción general detallada, consulte el código a continuación para ver la implementación completa To Count Circles and Ellipse en una imagen usando OpenCV. Para obtener más información, consulte este Enlace.
# Load image
image = cv2.imread('blobs.jpg')
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
plt.figure(figsize=(20, 20))
detector = cv2.SimpleBlobDetector_create()
# Detect blobs
points = detector.detect(image)
blank = np.zeros((1,1))
blobs = cv2.drawKeypoints(image, points, blank, (0,0,255),
cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)
number_of_blobs = len(keypoints)
text = "Total Blobs: " + str(len(keypoints))
cv2.putText(blobs, text, (20, 550), cv2.FONT_HERSHEY_SIMPLEX, 1, (100, 0, 255), 2)
plt.subplot(2, 2, 1)
plt.imshow(blobs)
# Filtering parameters
# Initialize parameter settiing using cv2.SimpleBlobDetector
params = cv2.SimpleBlobDetector_Params()
# Area filtering parameters
params.filterByArea = True
params.minArea = 100
# Circularity filtering parameters
params.filterByCircularity = True
params.minCircularity = 0.9
# Convexity filtering parameters
params.filterByConvexity = False
params.minConvexity = 0.2
# inertia filtering parameters
params.filterByInertia = True
params.minInertiaRatio = 0.01
# detector with the parameters
detector = cv2.SimpleBlobDetector_create(params)
# Detect blobs
keypoints = detector.detect(image)
# Draw blobs on our image as red circles
blank = np.zeros((1,1))
blobs = cv2.drawKeypoints(image, keypoints, blank, (0,255,0),
cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)
number_of_blobs = len(keypoints)
text = "No. Circular Blobs: " + str(len(keypoints))
cv2.putText(blobs, text, (20, 550), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 100, 255), 2)
# Show blobs
plt.subplot(2, 2, 2)
plt.title("Filtering Circular Blobs Only")
plt.imshow(blobs)
Notas finales
Entonces, en este artículo, tuvimos una discusión detallada sobre Procesamiento de imágenes mediante OpenCV. Espero que aprendas algo de este blog y te ayude en el futuro. Gracias por leer y tu paciencia. ¡Buena suerte!
Puedes consultar mis artículos aquí: Artículos
Identificación de correo: [email protected]
Conéctese conmigo en LinkedIn: LinkedIn
Los medios que se muestran en este artículo sobre el procesamiento de imágenes mediante OpenCV no son propiedad de DataPeaker y se utilizan a discreción del autor.





